
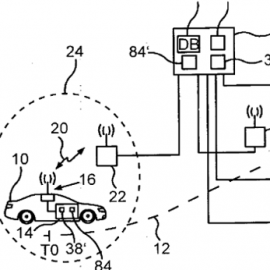
For mobile access to a stationary data network, a substantially location-dependent transmission bandwidth is provided by a wireless interface. The aim of the invention is to avoid movement-related limitations during the data transmission in a mobile terminal.
The method involves assigning a priority value to each motor vehicle.
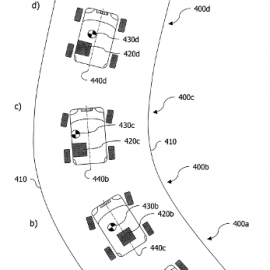
A technique for determining shifted cargo on a vehicle is described. Sensor fusion is used to continuously calculate the center of mass of a vehicle in motion. The device is continuously comparing data of existing sensors and comparing them to recent calculations of likewise situations. The center of mass is one of the key elements for stability and maneuverability of a vehicle. Shifted cargo can now be recognized and tracked.
Severity of change can be used to trigger warnings (loosen cargo scattering around), significantly improve advanced driver assistance systems (ADAS) and guarantee overall functionality for semi- or fully autonomous cars.